

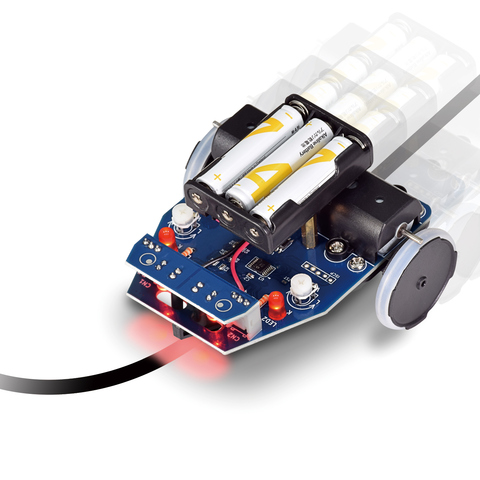
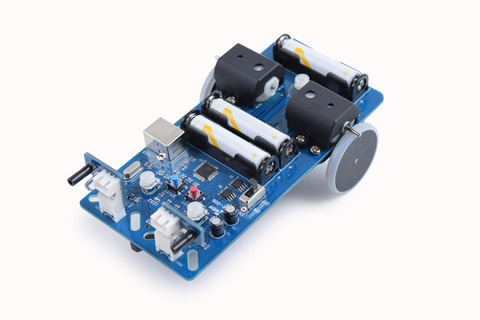
ライントレーサー(TK-742) 光センサーがいつも反応した状態になる
TK-742
・周りが(正確にはセンサーの周辺が)とても明るい状況の場合は、光センサーがいつも反応した状態になり、感度がうまく調整できません。 ロボットを動かす場所が明るす…
使い方に関するご質問(318 件中 41 - 60)
まず、お手持ちの製品の「製品名」及び「製品型番」をご確認ください。これらが分かっている場合、または検索したい語句がある場合には『キーワード/製品型番』に入力し『検索』ボタンをクリックしてください。
※製品名、製品型番の一部のみを入力して検索することもできます。
※検索結果は複数ページに渡る場合があります。表示された一覧の上部、及び下部中央の数字をクリックすることでページを表示させることができます。
・周りが(正確にはセンサーの周辺が)とても明るい状況の場合は、光センサーがいつも反応した状態になり、感度がうまく調整できません。 ロボットを動かす場所が明るす…
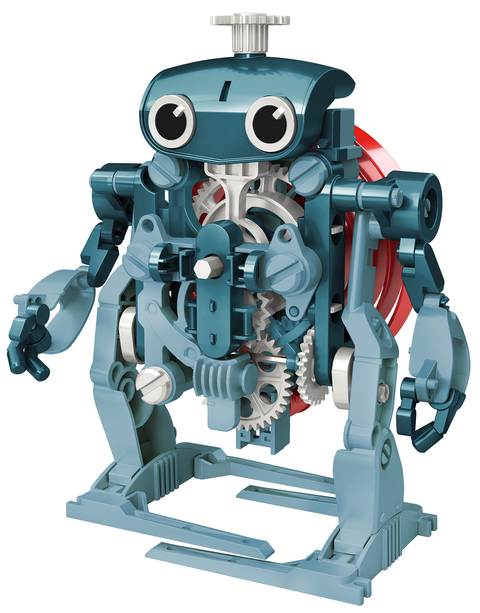
ロボタイミー(MR-9115)(ロボタイミー・パル(MR-9124)を含む)はゼンマイを巻いたままにした状態でしばらく置いておくと、下の写真のようにゼンマイ(大)がちぢまっ…
スマートフォンの内蔵のスピーカーの位置は機種によって異なっていますので、スマートフォンのスピーカの位置とピックアップの位置が大きくずれていてスマホシネマの画面…
ピックアップの位置とスマートフォンのスピーカの位置が離れていると、スマートフォンから発生している信号を十分にキャッチできずに音が大きくなりません。以下のことを…

ロボビット(JS-6216)がうまく動かないときは、下記手順でチェックを行ってください。1.太陽電池に当てている光は、快晴時の直射日光ですか?ロボビットで使用している太…

■点滅Aモード(ピカッピカッと点滅):LEDが点滅するときの点滅間隔とその間のLED点灯時間は以下のようになっています。VOLを回すと、VOLの値に応じて50mSec~1300mSecの…

プログラムを入力し実行すると一瞬動いたあとすぐに止まってしまい、もう一度実行ボタンを押してもプログラムが消えてしまっていて動かないような場合には、次の原因が考…

サイボーグハンド(MR-9112)のシリンダー部分は完全に密閉されているわけではありませんから、使用しているうちに下の写真のようにだんだんと空気が入ってしまいます。この…

アラームをセットした時間と実際にアラームが鳴りだす時間がずれているときの原因に針の取りつけが上手くいっていないことがあります。もう一度以下の手順で針の取りつけ…
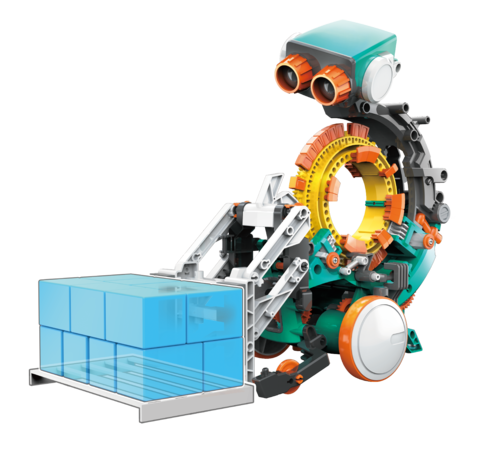
ビットさんの90°ターン、45°ターン、ストップは、左右のタイヤの内側にある上下に動くストッパーを上げ下げすることで制御します。90°や45°のターンをする場合、曲がる方…
ビットさんが後退するとき、プログラミングホイールに取り付けた後退ビットが、ギアボックスに取り付けたB5のレバーを押すことでタイヤが回転する向きが逆になります。後…
プログラミングホイールに取り付けた「ターンビット(90°、45°)」がはずれてしまうときは、次のチェックをしてください。・ビットはプログラミングホイールに確実に取り付…

とげまる(MR-9108)で、自分の背中のとげが動く音に反応してしまう場合、とげが正しい位置からずれていたり、動くときに何かに引っ掛かるなどして動作音が大きくなってい…
とげまるはモード1(でんぐり返しモード)の時に、手ばたきの音を2回キャッチすると丸まって動かない「スリープ状態」になります。この状態のときは、電源がオフになった…
写真で示した場所には部品がついていない状態で正常です。
・周りが(正確にはセンサーの周辺が)とても明るい状況の場合は、光センサーがいつも反応した状態になり、感度がうまく調整できません。ロボットを動かす場所が明るすぎ…
MR-006に使っているモーターは電子回路で制御しやすくした特別なモーターで、動作させるための電流が少なく、動作時のノイズが少ないものです。ミニ四駆用のモーターは強…
モーターの端子が基板に接触して電気が流れてモーターを回す構造になっていますが、そのモーターを取り付ける部品を基板に取り付けるときに、ねじを力任せに締めつけすぎ…