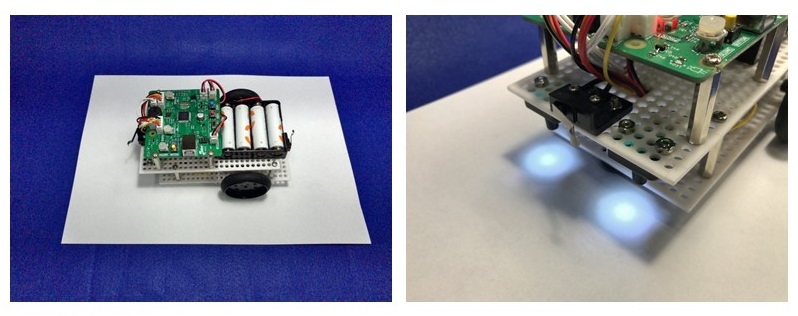
白い紙の上にロボットを置いていますか?
光センサーが白い紙の真上にくるように置きましょう。
また、メイン基板上の光センサー感度調整ボリューム(PHOTO L ADJ. , PHOTO R ADJ.)の角度を指やプラスドライバーで以下のイラストと同じ向きになるように回してください。
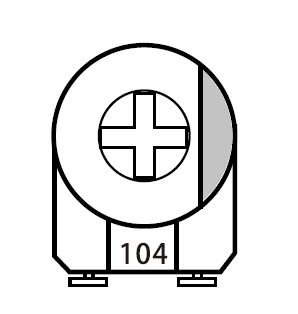
へこんでいる部分(イラストのグレーの部分)が右を向くように回します。
初期状態(購入直後)のテストプログラムが書き込まれている場合は、光センサーの下に黒い物を置くと、左の光センサーのときは「ブブブ...」(低い音)、右の光センサーのときは「ピピピ...」(高い音)とブザー音が鳴ります。
黒い物を置いていないときにもブザー音が鳴るときは感度設定が低すぎるので、「ブブブ...」のときは左、「ピピピ...」のときは右の光センサー感度調整ボリュームを時計回り(右回り)に少しずつ回して調整します。
黒い物を置いてもブザー音が鳴らないときは感度設定が高すぎるので、反応が悪い方の光センサーの感度調整ボリュームを反時計回り(左回り)に少しずつ回して調整します。